@inproceedings{roque2025opensourcemodularspacesystems,title={Towards Open-Source and Modular Space Systems with ATMOS},author={Roque, Pedro and Phodapol, Sujet and Krantz, Elias and Lim, Jaeyoung and Verhagen, Joris and Jiang, Frank and Dorner, David and Siegwart, Roland and Stenius, Ivan and Tibert, Gunnar and Mao, Huina and Tumova, Jana and Fuglesang, Christer and Dimarogonas, Dimos V.},year={2025},eprint={2501.16973},archiveprefix={arXiv},primaryclass={cs.RO},}
2024
Predictive and Vision-based Control for Multi-Agent Aerial and Space Systems
@book{roque2024predictive,title={Predictive and Vision-based Control for Multi-Agent Aerial and Space Systems},author={Roque, Pedro},year={2024},school={KTH Royal Institute of Technology},}
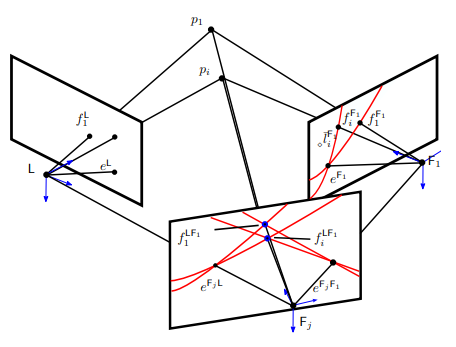
Multi-Agent Formation Control using Epipolar Constraints
Pedro Roque, Pedro Miraldo, and Dimos V Dimarogonas
@article{roque2024multi,title={Multi-Agent Formation Control using Epipolar Constraints},author={Roque, Pedro and Miraldo, Pedro and Dimarogonas, Dimos V},journal={IEEE Robotics and Automation Letters},year={2024},publisher={IEEE},}
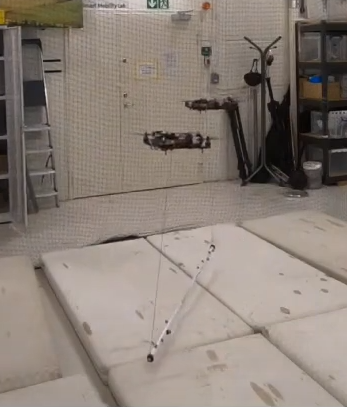
Collaborative Load Transportation in Microgravity Environments: Centralized and Decentralized Predictive Controllers
Sujet Phodapol, Pedro Roque, and Dimos V Dimarogonas
In 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE) 2024
@inproceedings{phodapol2024collaborative,title={Collaborative Load Transportation in Microgravity Environments: Centralized and Decentralized Predictive Controllers},author={Phodapol, Sujet and Roque, Pedro and Dimarogonas, Dimos V},booktitle={2024 IEEE 20th International Conference on Automation Science and Engineering (CASE)},pages={1548--1553},year={2024},organization={IEEE},}
2023
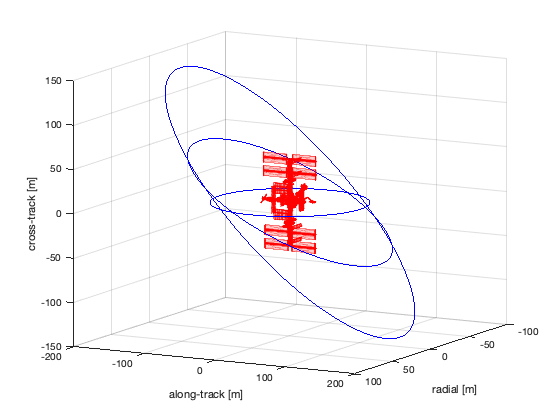
Corridor MPC for Multi-Agent Inspection of Orbiting Structures
Gregorio Marchesini, Pedro Roque, and Dimos V. Dimarogonas
In IEEE Conference on Decision and Control (CDC) 2023 2023
@inproceedings{marchesini2023cmpcinspection_preprint,booktitle={IEEE Conference on Decision and Control (CDC) 2023},author={Marchesini, Gregorio and Roque, Pedro and Dimarogonas, Dimos V.},title={Corridor MPC for Multi-Agent Inspection of Orbiting Structures},year={2023},}
2022
Coordination of Multi-Agent Systems: Predictive and Vision-based Control for Aerial and Space Robotics
@book{roque2022coordination,title={Coordination of Multi-Agent Systems: Predictive and Vision-based Control for Aerial and Space Robotics},author={Roque, Pedro},year={2022},school={KTH Royal Institute of Technology},}
ICRA 2022 Outstanding Coordination Award
Decentralized Model Predictive Control for Equilibrium-based Collaborative UAV Bar Transportation
Roberto C. Sundin, Pedro Roque, and Dimos V. Dimarogonas
In 2022 International Conference on Robotics and Automation (ICRA) 2022
@inproceedings{9811726,author={Sundin, Roberto C. and Roque, Pedro and Dimarogonas, Dimos V.},booktitle={2022 International Conference on Robotics and Automation (ICRA)},title={Decentralized Model Predictive Control for Equilibrium-based Collaborative UAV Bar Transportation},year={2022},pages={4915-4921},doi={10.1109/ICRA46639.2022.9811726},award={ICRA 2022 Outstanding Coordination Award},}
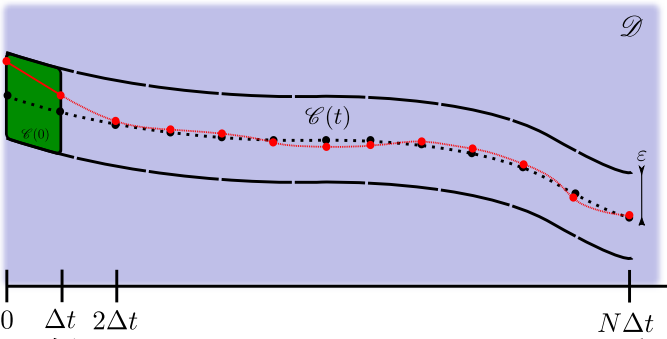
Corridor MPC: Towards Optimal and Safe Trajectory Tracking
P. Roque, W. Shaw Cortez, L. Lindemann, and 1 more author
@inproceedings{9867764,author={Roque, P. and Cortez, W. Shaw and Lindemann, L. and Dimarogonas, D. V.},booktitle={2022 American Control Conference (ACC)},title={Corridor MPC: Towards Optimal and Safe Trajectory Tracking},year={2022},pages={2025-2032},doi={10.23919/ACC53348.2022.9867764},}
2021
Efficient Cooperation of Heterogeneous Robotic Agents: A Decentralized Framework
Michalis Logothetis, George Karras, Konstantinos Alevizos, and 11 more authors
@article{9415417,author={Logothetis, Michalis and Karras, George and Alevizos, Konstantinos and Verginis, Christos and Roque, Pedro and Roditakis, Konstantinos and Makris, Alexandros and Garcia, Sergio and Schillinger, Philipp and Di Fava, Alessandro and Pelliccione, Patrizio and Argyros, Antonis and Kyriakopoulos, Kostas and Dimarogonas, Dimos V.},journal={IEEE Robotics & Automation Magazine},title={Efficient Cooperation of Heterogeneous Robotic Agents: A Decentralized Framework},year={2021},volume={28},number={2},pages={74-87},doi={10.1109/MRA.2021.3064761},}
2020
Fast Model Predictive Image-Based Visual Servoing for Quadrotors
Pedro Roque, Elisa Bin, Pedro Miraldo, and 1 more author
In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
@inproceedings{9340759,author={Roque, Pedro and Bin, Elisa and Miraldo, Pedro and Dimarogonas, Dimos V.},booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Fast Model Predictive Image-Based Visual Servoing for Quadrotors},year={2020},pages={7566-7572},doi={10.1109/IROS45743.2020.9340759},}
Decentralized Formation Control for Multiple Quadrotors under Unidirectional Communication Constraints
Pedro Roque, Shahab Heshmati-Alamdari, Alexandros Nikou, and 1 more author
@article{ROQUE20203156,title={Decentralized Formation Control for Multiple Quadrotors under Unidirectional Communication Constraints},journal={IFAC-PapersOnLine},volume={53},number={2},pages={3156-3161},year={2020},note={21st IFAC World Congress},issn={2405-8963},doi={https://doi.org/10.1016/j.ifacol.2020.12.1060},url={https://www.sciencedirect.com/science/article/pii/S2405896320314312},author={Roque, Pedro and Heshmati-Alamdari, Shahab and Nikou, Alexandros and Dimarogonas, Dimos V.},}
Decentralized Nonlinear MPC for Robust Cooperative Manipulation by Heterogeneous Aerial-Ground Robots
Nicola Lissandrini, Christos K. Verginis, Pedro Roque, and 2 more authors
In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
@inproceedings{9341023,author={Lissandrini, Nicola and Verginis, Christos K. and Roque, Pedro and Cenedese, Angelo and Dimarogonas, Dimos V.},booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Decentralized Nonlinear MPC for Robust Cooperative Manipulation by Heterogeneous Aerial-Ground Robots},year={2020},pages={1531-1536},doi={10.1109/IROS45743.2020.9341023},}
2018
Asymmetric Collaborative Bar Stabilization Tethered to Two Heterogeneous Aerial Vehicles
Pedro O. Pereira, Pedro Roque, and Dimos V. Dimarogonas
In 2018 IEEE International Conference on Robotics and Automation (ICRA) 2018
@inproceedings{8460529,author={Pereira, Pedro O. and Roque, Pedro and Dimarogonas, Dimos V.},booktitle={2018 IEEE International Conference on Robotics and Automation (ICRA)},title={Asymmetric Collaborative Bar Stabilization Tethered to Two Heterogeneous Aerial Vehicles},year={2018},pages={5247-5253},doi={10.1109/ICRA.2018.8460529},}
@book{Roque1177557,author={Roque, Pedro},institution={KTH, Decision and Control Systems (Automatic Control)},pages={71},school={KTH, Decision and Control Systems (Automatic Control)},title={Heterogeneous Collaborative Aerial Manipulation},series={TRITA-EE},issn={1653-5146},number={2017:183},year={2017},}
2016
Space CoBot: Modular design of an holonomic aerial robot for indoor microgravity environments
Pedro Roque, and Rodrigo Ventura
In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016
@inproceedings{7759645,author={Roque, Pedro and Ventura, Rodrigo},booktitle={2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={Space CoBot: Modular design of an holonomic aerial robot for indoor microgravity environments},year={2016},pages={4383-4390},doi={10.1109/IROS.2016.7759645},}
A Space CoBot for personal assistance in space stations
Pedro Roque, and Rodrigo Ventura
In IJCAI-2016 Workshop on Autonomous Mobile Service Robots 2016
@inproceedings{roque2016space,author={Roque, Pedro and Ventura, Rodrigo},booktitle={IJCAI-2016 Workshop on Autonomous Mobile Service Robots},title={A Space CoBot for personal assistance in space stations},year={2016},}